COURSE DESCRIPTION
Robots today move far too conservatively, using control systems that attempt to maintain full control authority at all times. Humans and animals move much more aggressively by routinely executing motions which involve a loss of instantaneous control authority. Controlling nonlinear systems without complete control authority requires methods that can reason about and exploit the natural dynamics of our machines.
This course discusses nonlinear dynamics and control of underactuated mechanical systems, with an emphasis on machine learning methods. Topics include nonlinear dynamics of passive robots (walkers, swimmers, flyers), motion planning, partial feedback linearization, energy-shaping control, analytical optimal control, reinforcement learning/approximate optimal control, and the influence of mechanical design on control. Discussions include examples from biology and applications to legged locomotion, compliant manipulation, underwater robots, and flying machines.
Professor Tedrake offered an updated version of this course that can be accessed through the edX platform.
Acknowledgements
Professor Tedrake would like to thank John Roberts for his help with the course and videotaping the lectures.

Syllabus
Course Meeting Times
Lecture: 2 sessions / week, 1.5 hours / session
Recitations: 1 session / week, 1 hour / session
Description
Robots today move far too conservatively, using control systems that attempt to maintain full control authority at all times. Humans and animals move much more aggressively by routinely executing motions which involve a loss of instantaneous control authority. Controlling nonlinear systems without complete control authority requires methods that can reason about and exploit the natural dynamics of our machines.
This course discusses nonlinear dynamics and control of underactuated mechanical systems, with an emphasis on machine learning methods. Topics include nonlinear dynamics of passive robots (walkers, swimmers, flyers), motion planning, partial feedback linearization, energy-shaping control, analytical optimal control, reinforcement learning/approximate optimal control, and the influence of mechanical design on control. Discussions include examples from biology and applications to legged locomotion, compliant manipulation, underwater robots, and flying machines.
For course 6, area II students, this course will fulfill the Technical Qualifying Exam (TQE) requirement for artificial intelligence.
NOTE: Professor Tedrake offered an updated version of this course that can be accessed through the edX platform.
Lecture 1: Introduction
Topics covered: Introduction
Instructors: Russell Tedrake
Lecture 2: The Simple Pendulum
Topics covered: The simple pendulum
Instructors: Russell Tedrake
Lecture 3: Optimal Control of the Double Integrator
Topics covered: Optimal control of the double integrator
Instructors: Russell Tedrake
Lecture 4: Optimal Control of the Double Integrator (cont.)
Topics covered: Optimal control of the double integrator (continued)
Instructors: Russell Tedrake
Lecture 5: Numerical Optimal Control (Dynamic Programming)
Topics covered: Numerical optimal control (dynamic programming)
Instructors: Russell Tedrake
Lecture 6: Acrobot and Cart-pole
Topics covered: Acrobot and cart-pole
Instructors: Russell Tedrake
Lecture 7: Swing-up Control of Acrobot and Cart-pole Systems
Topics covered: Swing-up control of acrobot and cart-pole systems
Instructors: Russell Tedrake
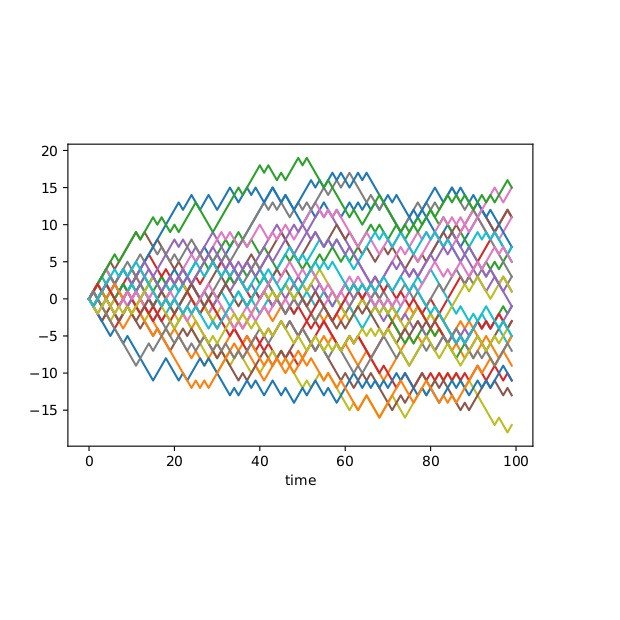
Lecture 8: Noise
Description: This lecture introduces a noise model based on a Gaussian random variable. Background on calculating mean and variance of probability density function is given alongside steps to estimate noise parameters and calculate bit energy.
Instructor: George Verghese
Lecture 9: Transmitting on a Physical Channel
Description: This lecture begins with background on probability for working with random variables. Conversion, and signal modulation and demodulation are explained. The unit step and sample are introduced alongside time invariant and linear systems.
Instructor: George Verghese
Lecture 10: Linear Time-Invariant (LTI) Systems
Description: This lecture covers modeling channel behavior, relating the unit sample and step responses, decomposing a signal into unit samples, modeling LTI systems, and properties of convolutions.
Instructor: George Verghese
Lecture 11: LTI Channel and Intersymbol Interference
Description: This lecture provides an introduction to Audiocom, which is used for the unit’s assignments. The demonstration addresses troubleshooting and reading the output, and places it in context with course content discussed so far.
Instructors: Hari Balakrishnan and George Verghese
Lecture 12: Filters and Composition
Description: This lecture covers the limitation of time-domain and convolutions, and introduces frequency-domain and sinusoidal inputs to LTI systems. Application of complex exponentials to representing sinusoids is shown.
Instructor: George Verghese
Lecture 13: Frequency Response of LTI Systems
Description: This lecture continues the discussion of properties of the frequency response and the shift from time to frequency domain. Examples of deconvolution in frequency-domain view, designing an ideal low-pass filter, and spectral decomposition are provided.
Instructor: George Verghese
Lecture 14: Spectral Representation of Signals
Description: This lecture starts with a demonstration of echo cancelation using deconvolution, and then continues to cover the spectral content of signals. Fast Fourier transform, and the effect of a low-pass channel are also discussed.
Instructor: George Verghese
Lecture 15: Modulation/Demodulation
Description: This lecture introduces phase characteristic in the frequency response, and the derivation of DTFT for a rectangular pulse. An example of how to send a pulse over a low-pass and a bandpass channel opens discussion about modulation and demodulation.
Instructor: George Verghese
Lecture 16: More on Modulation/Demodulation
Description: This lecture starts with applying FFT for a finite duration and the difference between DTFT and DTFS. The remainder of the lecture covers the demodulation frequency diagram, correcting error in demodulation and phase ambiguity, and multiple trasnmitters.
Instructor: George Verghese
Lecture 17: Packet Switching
Description: This lecture introduces communication networks, with MIT’s network serving as an example. Packet-switched networks are discussed with examples of packet headers, traffic, and the sources of delay.
Instructor: Hari Balakrishnan
Lecture 18: MAC Protocols
Description: This lecture focuses on shared media networks and shared communications channels. Measures for optimization such as utilization, fairness, and bounded delay are introduced, along with an example model using slotted and stabilized Aloha.
Instructor: Hari Balakrishnan
Lecture 19: Network Routing (without failures)
Description: This lecture covers networking routing in multi-hop networks. After an interactive simulation game, distributed routing, distance-vector routing, and link-state routing are discussed with minimum cost path in mind.
Instructor: Hari Balakrishnan
Lecture 20: Network Routing (with failures)
Description: This lecture continues to cover routing protocols within the context of failure. Failure resilience for the different protocols is discussed along with the solution of periodic communication for eventual convergence.
Instructor: Hari Balakrishnan
Lecture 21: Reliable Transport
Description: This lecture covers implementation of TCP and providing reliable data transfer. The stop-and-wait and sliding window protocols are discussed with their benefits and disadvantages in preventing lost or duplicate packets.
Instructor: Hari Balakrishnan
Lecture 22: Sliding Window Analysis, Little's Law
Description: This lecture continues with an analysis of sliding window protocol and how it handles packet loss. Little’s Law is introduced to relate the average number of packets to the average service rate and average delay of a stable system.
Instructor: Hari Balakrishnan
Lecture 23: A Brief History of the Internet
Description: This lecture offers a historical account of the development of the Internet and Internet Protocol (IP). The ideal case for area networking is presented, followed by the creation of the domain name system (DNS).
Instructor: Hari Balakrishnan
Lecture 24: History of the Internet cont'd, Course Summary
Description: This lecture continues the history of the Internet through the recent decades and addresses problems such as rapid growth, congestion, service attacks, and security threats. A summary of the course content is then presented at the end.
Instructor: Hari Balakrishnan