COURSE DESCRIPTION
6.003 covers the fundamentals of signal and system analysis, focusing on representations of discrete-time and continuous-time signals (singularity functions, complex exponentials and geometrics, Fourier representations, Laplace and Z transforms, sampling) and representations of linear, time-invariant systems (difference and differential equations, block diagrams, system functions, poles and zeros, convolution, impulse and step responses, frequency responses). Applications are drawn broadly from engineering and physics, including feedback and control, communications, and signal processing.

Go to Website
Syllabus
Course Meeting Times
Lectures: 2 sessions / week, 1 hour / session
Recitations: 2 sessions / week, 1 hour / session
Description
6.003 covers the fundamentals of signal and system analysis, focusing on representations of discrete-time and continuous-time signals (singularity functions, complex exponentials and geometrics, Fourier representations, Laplace and Z transforms, sampling) and representations of linear, time-invariant systems (difference and differential equations, block diagrams, system functions, poles and zeros, convolution, impulse and step responses, frequency responses). Applications are drawn broadly from engineering and physics, including feedback and control, communications, and signal processing.
Prerequisites
6.02 Introduction to EECS II
Textbook
Oppenheim, Alan, and Alan Willsky. . 2nd ed. Prentice Hall, 1996. ISBN: 9780138147570.
Grading
Your grade in 6.003 will be the weighted average of the following component grades:
| Midterm 1 | 10% |
| Midterm 2 | 15% |
| Midterm 3 | 20% |
| Final exam | 40% |
| Homework, participation, other factors | 15% |
Collaboration Policy
We encourage students to discuss assignments in this subject with other students and with the teaching staff to better understand the concepts. However, when you submit an assignment under your name, we assume that you are certifying that the details are entirely your own work and that you played at least a substantial role in the conception stage.
You should not use results from other students (from this year or from previous years) in preparing your solutions. You should not take credit for computer code or graphics that were generated by other students. Students should never share their solutions with other students.
Any student caught plagiarizing will receive a grade of zero on the assignment. All incidents of plagiarism will be reported to the Committee on Discipline (COD). More information about what constitutes plagiarism can be found at the MIT Academic Integrity site.
Lecture 1: Signals and Systems
Instructor: Dennis Freeman
Description: This lecture introduces the administrative details of the course, and uses examples from several engineering fields to illustrate the central abstraction of 6.003: analysis and design of systems via their signal transform properties.
Lecture 2: Discrete-Time (DT) Systems
Instructor: Dennis Freeman
Description: Discrete-time systems can be represented in several ways: difference equations, block diagrams, and operators. Each method requires a different analytical approach. Feedback loops in cyclic systems lead to convergent or divergent responses.
Lecture 3: Feedback, Poles, and Fundamental Modes
Instructor: Dennis Freeman
Description: To analyze complicated systems of adders, delays, and gains, factor their polynomial expression into simpler components using the poles. These fundamental modes combine to produce the unit response of a system.
Lecture 4: Continuous-Time (CT) Systems
Instructor: Dennis Freeman
Description: Drawing analogies with previous concepts in discrete-time systems, this lecture discusses the block diagrams, polynomial expressions, poles, convergence regions, and fundamental modes of continuous-time systems.
Lecture 5: Z Transform
Instructor: Dennis Freeman
Description: After reviewing concepts in discrete-time systems, the Z transform is introduced, connecting the unit sample response h[n] and the system function H(z). The lecture covers the Z transform’s definition, properties, examples, and inverse transform.
Lecture 6: Laplace Transform
Instructor: Dennis Freeman
Description: Building on concepts from the previous lecture, the Laplace transform is introduced as the continuous-time analogue of the Z transform. The lecture discusses the Laplace transform’s definition, properties, applications, and inverse transform.
Lecture 7: Discrete Approximation of Continuous-Time Systems
Instructor: Dennis Freeman
Description: Having established representations and analytical methods for discrete-time and continuous-time systems, today’s lecture uses the example of a leaky tank to show how Euler and trapezoidal approximations can convert a continuous system to a discrete one.
Lecture 8: Convolution
Instructor: Dennis Freeman
Description: In linear time-invariant systems, breaking an input signal into individual time-shifted unit impulses allows the output to be expressed as the superposition of unit impulse responses. Convolution is the general method of calculating these output signals.
Lecture 9: Frequency Response
Instructor: Dennis Freeman
Description: The response of a system to sinusoidal input gives valuable information about its behavior in the frequency domain, similar to convolution in the time domain. Eigenfunctions and vector plots are used to explore this frequency response.
Lecture 10: Feedback and Control
Instructor: Russ Tedrake
Description: Prof. Tedrake introduces the power and complexity of modern control systems, which use feedback to stabilize and compensate for delays and other errors. Examples are taken from his research into perching planes and other high-performance aircraft.
Lecture 11: Continuous-Time (CT) Frequency Response and Bode Plot
Instructor: Dennis Freeman
Description: Bode plots are a simpler method of graphing the frequency response, using the poles and zeros of the system to construct asymptotes for each segment on a log-log plot. The Q factor affects the sharpness of peaks and drop-offs in the system.
Lecture 12: Continuous-Time (CT) Feedback and Control, Part 1
Instructor: Dennis Freeman
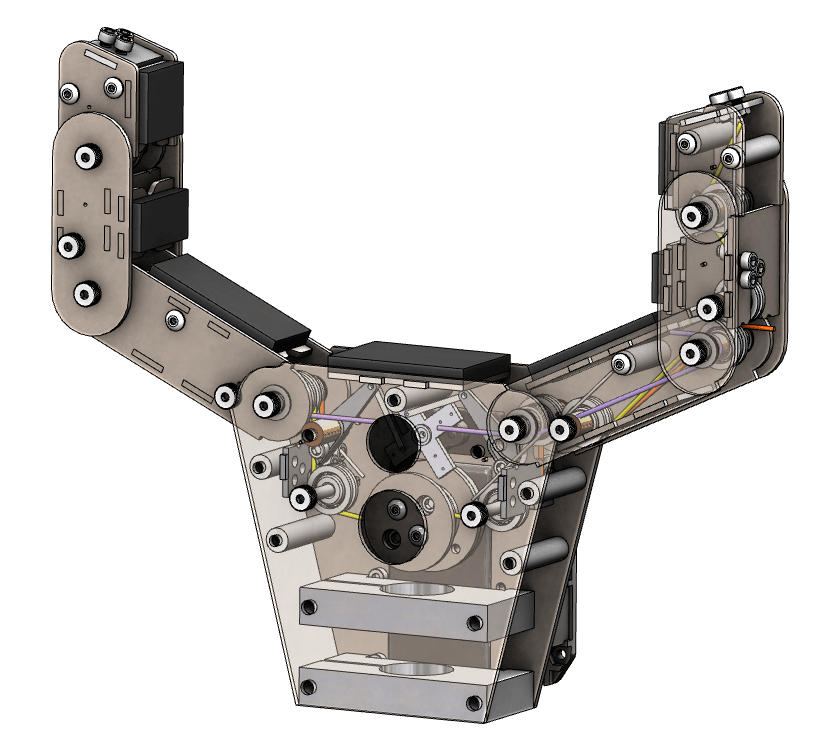
Description: Today’s lecture continues the discussion of control systems by demonstrating how feedback loops can add speed and bandwidth to the LM741 op-amp, and allow better control of a robot arm’s angular position.
Lecture 13: Continuous-Time (CT) Feedback and Control, Part 2
Instructor: Dennis Freeman
Description: Additional examples today illustrate the use of feedback to reduce sensitivity to variable component parameters and crossover distortion in audio systems, and to control two unstable systems (magnetic levitation, inverted pendulum).
Lecture 14: Fourier Representations
Instructor: Dennis Freeman
Description: In the next half of the course, periodic functions are represented as sums of harmonic functions, via Fourier decomposition. Linear time-invariant systems amplify and phase-shift these inputs to produce filtered output, an important new concept.
Lecture 15: Fourier Series
Instructor: Dennis Freeman
Description: Today’s lecture discusses an application of Fourier series, exploring how the vocal tract filters frequencies generated by the vocal cords. Speech synthesis and recognition technology uses frequency analysis to accurately reconstruct vowels.
Lecture 16: Fourier Transform
Instructor: Dennis Freeman
Description: The concept of the Fourier series can be applied to aperiodic functions by treating it as a periodic function with period T = infinity. This new transform has some key similarities and differences with the Laplace transform, its properties, and domains.
Lecture 17: Discrete-Time (DT) Frequency Representations
Instructor: Dennis Freeman
Description: As digital signal processing components have become cheaper, traditional design problems in audio and video systems have converted to discrete-time. This lecture compares system responses and Fourier representations in discrete- and continuous-time.
Lecture 18: Discrete-Time (DT) Fourier Representations
Instructor: Dennis Freeman
Description: Continuing the comparison of continuous- and discrete-time signals, today’s lecture discusses the DT Fourier transform, computation of Fourier series via the Fast Fourier Transform (FFT), and examples from digital image processing.
Lecture 19: Relations Among Fourier Representations
Instructor: Dennis Freeman
Description: Today’s lecture solidifies the connections between continuous- and discrete-time Fourier series and transforms, converting between the time and frequency domains with familiar tools such as convolution, periodic extension, and sampling.
Lecture 20: Applications of Fourier Transforms
Instructor: Dennis Freeman
Description: Three examples of Fourier transforms in action are given: removing noise from an electrocardiogram signal, using laser diffraction to calculate the groove spacing on CDs and DVDs, and determining the structure of DNA via x-ray crystallography.
Lecture 21: Sampling
Instructor: Dennis Freeman
Description: Sampling produces a discrete-time (digital) signal from a continuous-time (physical) phenomenon. Anti-aliasing and reconstruction filters remove unnecessary frequencies while retaining enough information to reconstruct the original signal.
Lecture 22: Sampling and Quantization
Instructor: Dennis Freeman
Description: Digital audio, images, video, and communication signals use quantization to create discrete representations of continuous phenomena. Efficient transmission and reconstruction uses techniques such as dithering, progressive refinement, and the JPEG encoding.
Lecture 23: Modulation, Part 1
Instructor: Dennis Freeman
Description: Efficient signal transmission and reception requires wavelengths matching the size of the antenna; for speech, this requires frequencies around the GHz range. Broadcast radio developed AM and FM to produce accurate reception of multiplexed signals.
Lecture 24: Modulation, Part 2
Instructor: Dennis Freeman
Description: Continuing the previous discussion of AM in radio, Prof. Freeman analyzes phase and frequency modulated (PM/FM) signals, before presenting research showing improvement in optical microscopy via phase-modulated illumination.
Lecture 25: Audio CD
Instructor: Dennis Freeman
Description: The final Signals and Systems lecture explains how audio playback evolved from the fragile Edison cylinder phonograph to durable modern optical disks, through the application of digital signal processing concepts.